

招待講演のご報告:Morphological Computation(YouTube)にて登壇しました
信州大学・梅舘研究室の梅舘拓也が,YouTubeチャンネル「Morphological Computation」に招待され,“Emergence Through Conflict — Morphological Comp […]

英文学術雑誌 JRMに岩本先生との共同研究が掲載
英文学術雑誌 Journal of Robotics and Mechatronics (JRM)に,当研究室と共同研究先の信州大学 繊維学部 機会ロボット学科 バイオエンジニアリングコース動作可微分多様体研究室 岩本 […]

2024年度卒業研究発表会で研究成果を発表
2025年3月12日(木)に梅舘研の学部4年生の稲葉 悠馬さん,今元 寛文さん,北野 佑典さんの1年間の研究成果を,信州大学繊維学部機械・ロボット学科コース機能機械学コース卒業研究発表会にて発表しました.この研究内容は, […]

2024年度修士論文発表会で研究成果を発表
ゆったりした衣服のための多重ジグザグ縫い刺繍型曲げセンサと深層学習を用いた動作分類システムの開発 発表者:南海成さん 要約 本研究では,ゆったりした衣服に統合可能な刺繍型曲げセンサを開発し,深層学習を用いた動作分類システ […]

英文学術雑誌 IEEE Accessに南 海成 さんの研究が掲載
英文学術雑誌 IEEE Access に,当研究室M2の南 海成さんの研究「ゆったりとした衣服に対応する多重ジグザグ縫い刺繍センサーを用いた動作分類」が掲載されました.オープンアクセスで,こちらからPDFと提出動画を見る […]

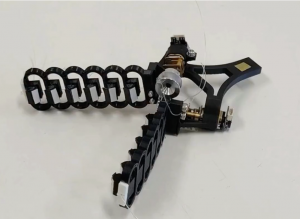
英文学術雑誌 Advanced Roboticsに山本 峻也さんの研究が掲載
英文学術雑誌 Advanced Robotics に,当研究室M2の山本 峻也さんの研究「操作力ベクトルに基づいた腱駆動型連続体フィンガーの剛性分布の最適化」が掲載されました.オープンアクセスで,こちらからPDFと提出動 […]

英文学術雑誌 IEEE Robotics and Automation Lettersに野々山葵介 さんの研究が掲載
英文学術雑誌 IEEE Robotics and Automation Letters に,当研究室のOBの野々山葵介さんの研究「曲げとねじれを利用した進行方向制御可能なフリッピング弾性ロボット」の掲載されました.オープ […]

英文学術雑誌 JRMに吉川 大喜さんの研究が掲載
英文学術雑誌 Journal of Robotics and Mechatronics (JRM)に,当研究室のOBの吉川 大喜さんの研究「少数アクチュエータで駆動する連続体ロボットの複雑な変形設計」の掲載されました.オ […]
NHK教育ヴィランの言い分でイモムシロボットが取り上げられました
2024年3月2日 午前10:30公開 NHK教育「ヴィランの言い分」にて,本研究室のOB小野寺智哉さんの研究である,イモムシロボットハンドが取り上げられました.このリンクは,番組の内容をまとめてくれています.繊維学部の […]

IROS2023:志村賢人さんが連続ジャンプ可能な双安定構造を持つテンセグリティを発表
当研究室の卒業生の志村賢人さんの研究が,ロボット系ではトップカンファレンスのIROS2023(The 2023 IEEE/RSJ International Conference on Intelligent Robot […]