
Satoshi Iobe's research has been published in IEEE Robotics and Automation Letters.
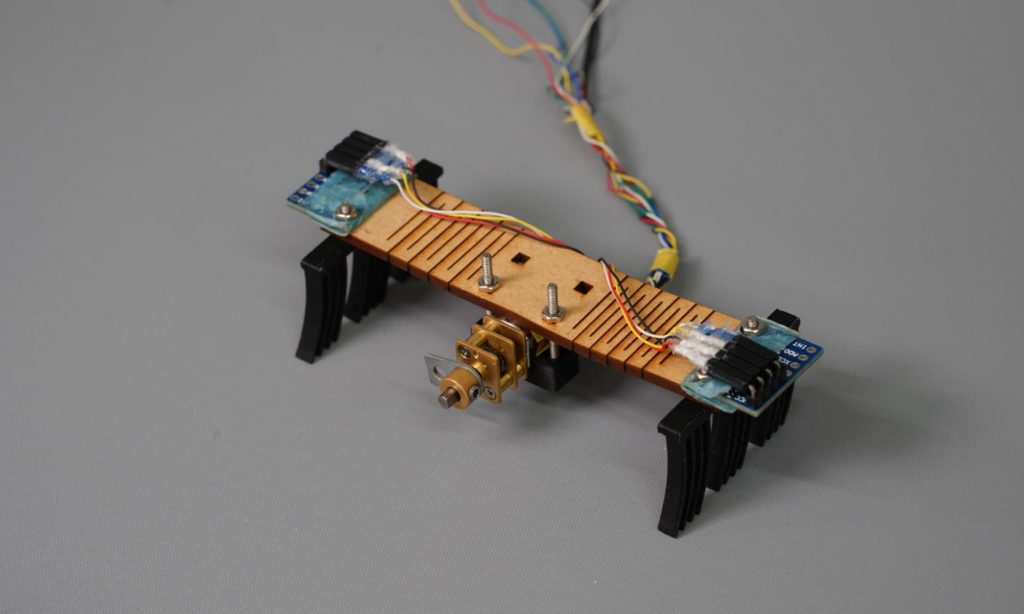
Mr. Satoshi IOBE, a member of our laboratory, has developed a vibrating robot that can produce locomotion forward, turn to the right, turn to the left, and make various other movements despite the use of only one motor. The research article is available on IEEE Robotics and Automation Letters (IF: 3.74 (2020)). Mr. Iyobe successfully won the acceptance. Crackle!
Diverse Behaviors of a Single-Motor-Driven Soft-Bodied Robot Utilizing the Resonant Vibration of 2D Repetitive Slit Patterns, Satoshi Iyobe; Masahiro Shimizu; Takuya Umedachi, IEEE Robotics and Automation Letters, Vol. 7, Issue: 2, pp. 992-999, April 2022.
