
For designing Soft-bodied robots inspired by living organisms
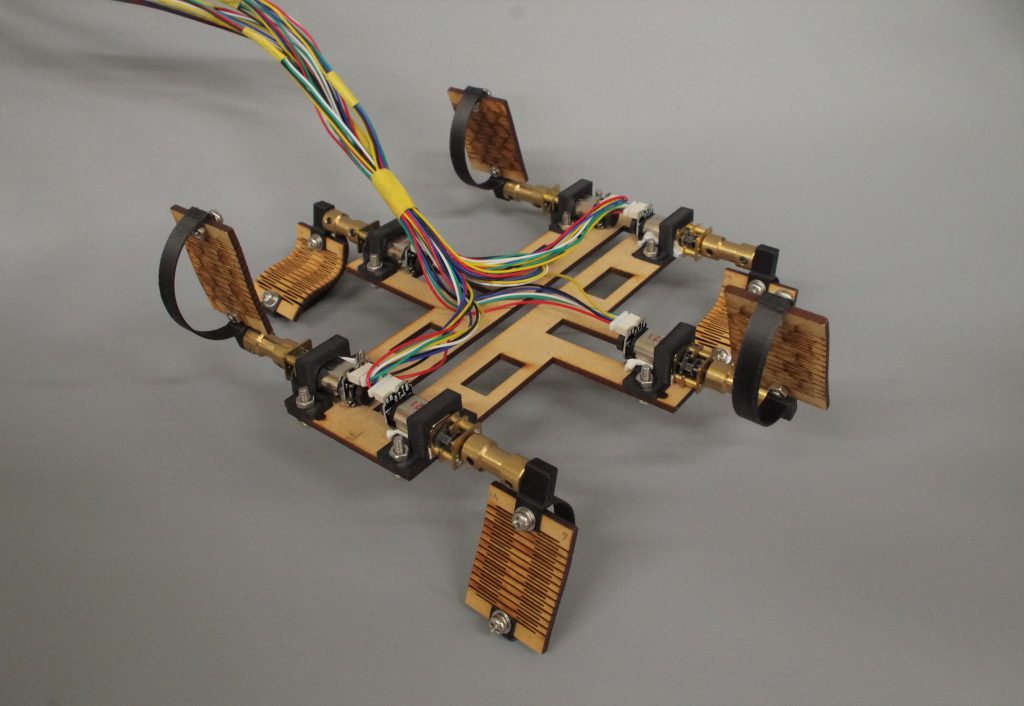
Tenacious and adaptive behaviors of simple organisms are produced by their highly deformable bodies and the limited computational cost of their nervous system. Mechanical softness and interaction with a complex environment are key to understanding such behaviors. From the perspective of how to control the soft bodies, biological research reveals that some simple organisms rely on decentralized control and exploit internal and external mechanical interactions (e.g., central pattern generators in vertebrates, distributed nervous systems in insects, starfish, and jellyfish). These features are in sharp contrast to the conventional robots that use stiff/rigid bodies and centralized controllers.
We consider the "mechanical softness" to be an essential difference between machines and organisms and are developing and investigating intelligence that can be emerged from mechanical softness.
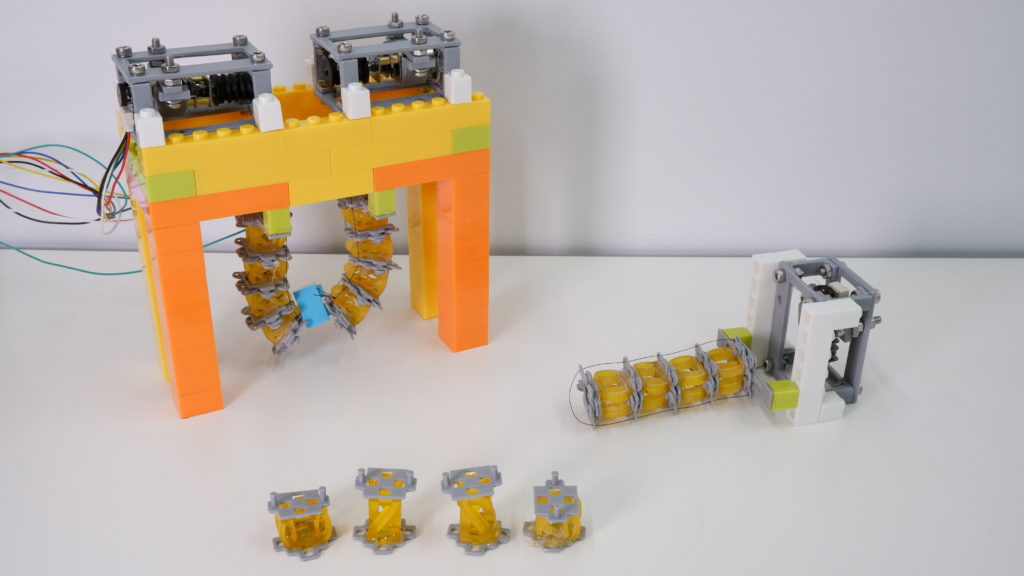
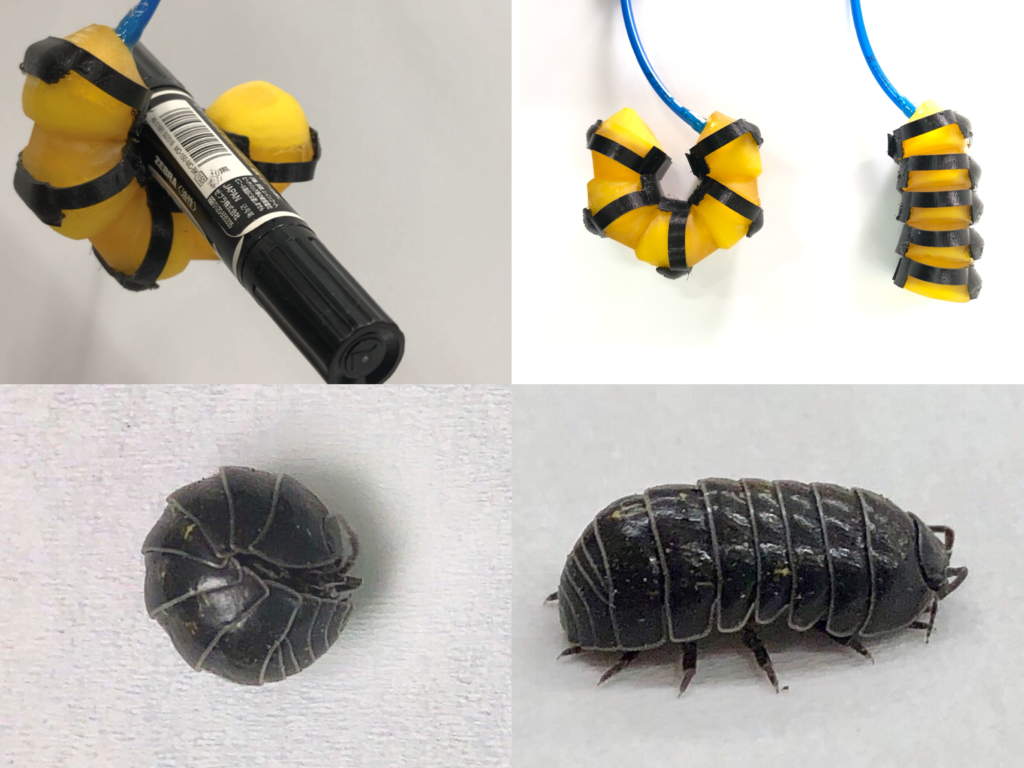
ソフト空気圧アクチュエータ

There are many more examples of research, robots, sensors, and actuators under development and yet to be published. We can show you when you stop by the lab.
Collaborative Research
