
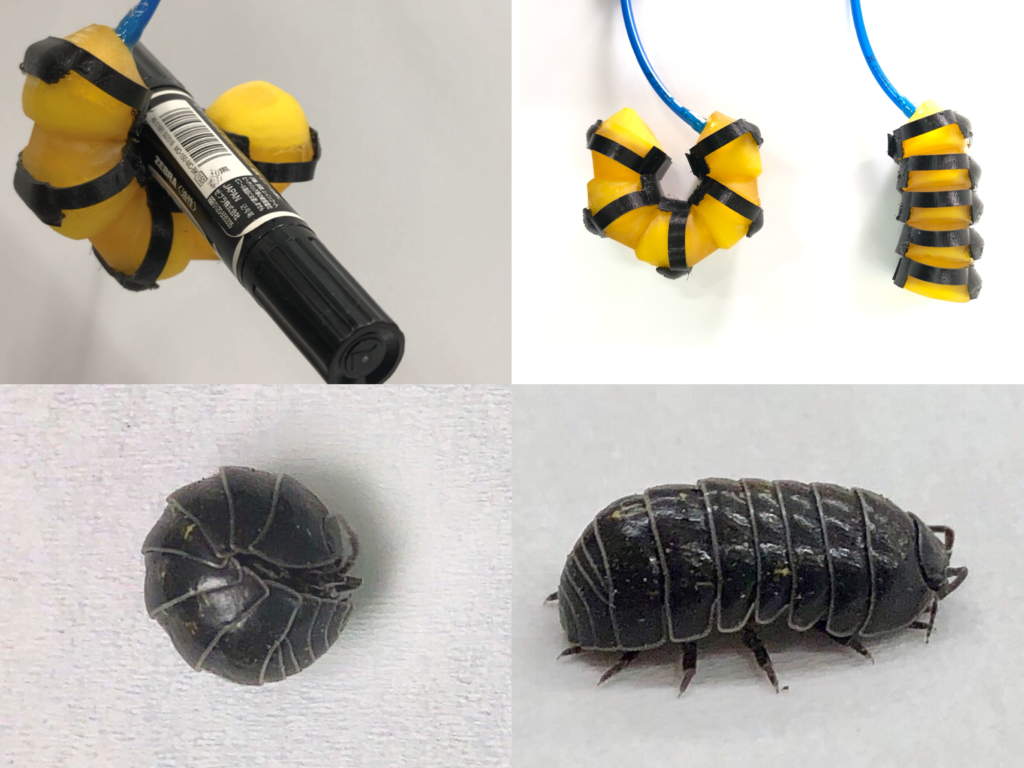
This research aims to develop foldable actuators inspired by the Origami structures of creatures in nature. For example, arthropods (such as crabs and insects) produce motion and locomotion by stretching and bending parts of their bodies by creating wrinkles and hinges in their exoskeletons. This study focused on foldable structure in a Roly-poly, which transforms between a beam-like and spherical morphology, and fabricated an actuator by mimicking the transformation. (We can't tell much about it because the research hasn't been published yet. However, we will add to this page after the conference presentation.)
This research has been conducted by Mr. Keisuke Kayama of our laboratory as his graduation research and will be presented at Robomech2022 (Japanese domestic conference).