IROS2022とRA-Lに野々山葵介さんの研究が採択されました.
当研究室でM1の野々山葵介さんの研究が,ロボット系ではトップカンファレンスのIROS2022(The 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems)とIEEE Robotics Automation Letter (RA-L)に採択されました:
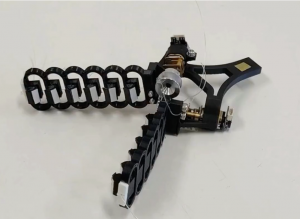
- Upside-down Brachiation Robot Using Elastic Energy Stored through Soft Body Deformation, Kisuke Nonoyama, Masahiro Shimizu, Takuya Umedachi, The 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2022), Oct. 2022 (accepted).

概要:この研究発表は,アギトアリの大ジャンプやシャコパンチのように,ソフトボディに弾性エネルギーを蓄えて瞬時に放出することで,動力源(モータ)の能力を超えた高速移動ができるロボットを作ったよ,と言う内容です.具体的には,この素早い動きを活かし,枝などの筒状の表面の上を移動する運動(逆さブラキエーション)を実現しました.素早い動きは,特に枝の上を動き回る移動運動を実現するときに重要です.なぜなら,ロボットの体を支えるグリッパーが枝から離れる時間はなるべく小さい方が良いからです.我々はシミュレーションモデルとロボット実機を作り,柔らかいボディに弾性エネルギーを蓄積・放出することで,逆さブラキエーションが可能なソフトロボットを実証しました.
どんなロボットか動画を見た方が早いと思うので,下記にYoutube動画を貼り付けておきました:
今年のIROSは京都で開催されます.是非,講演を聴きにきていただいて,活発な議論を交わしましょう!