
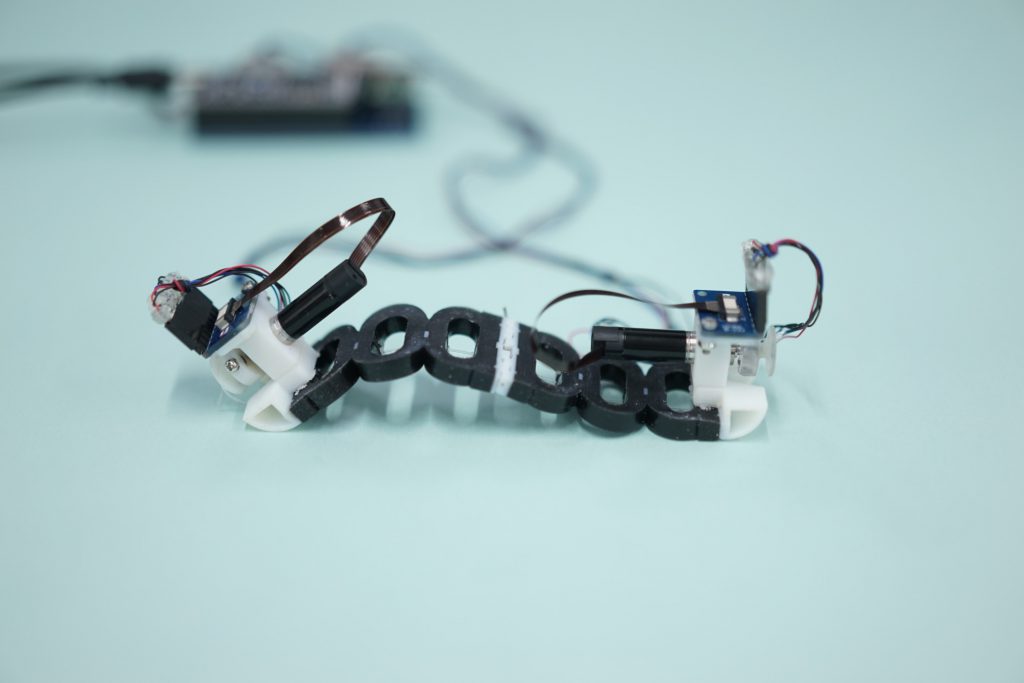
複数の変形モードを同時に使って機能設計出来うることこそが,ソフトロボットの醍醐味です.骨格を持たない完全変態型昆虫の幼虫であるイモムシ(カイコ蛾の幼虫)の移動運動を観測すると,曲げと圧縮変形の両方を使っていることがわかります.この生物学的な知見に着目し,ソフトロボットのボディである梁を空洞状に設計し,曲げと圧縮変形が同時に起こるように設計しました.この2つの変形モードを同時に使うイモムシロボットは,曲げ変形のみを使うものより高速に移動運動する出来ることを示しました(RA-L, ICRA19).更に,このロボットの駆動周波数を変えると,ある周波数では主に曲げ変形を這行(しゃこう)を生成し,別の周波数では主に圧縮変形を這行を生成することも示しました(RoboSoft19).
この研究ことから,1つの変形モードにこだわらず複数の変形モードを同時に使うことで,少ないアクチュエータの数で,多様で機能的な振る舞いを実現できることを示しました.
本研究は,当研究室のディレクターの梅舘拓也が,東京大学情報理工学系研究科川原研究室の特認講師として務めていたときの研究です.この研究は,下記の学術雑誌並びに国際学会にて発表しました:
- Caterpillar-inspired Crawling Robot using Both Compression and Bending Deformations, Takuya Umedachi, Masahiro Shimizu, Yoshihiro Kawahara, IEEE Robotics and Automation Letters, DOI: 10.1109/LRA.2019.2893438, 2019 (pdf)
- Actuation Frequency-Dependent Automatic Behavioral Switching on Caterpillar-Inspired Crawling Robot, Takuya Umedachi, Masahiro Shimizu, Yoshihiro Kawahara, 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft 2019), Paper MoPS.28, Soul, Korea, April 15, 2019 (pdf).