
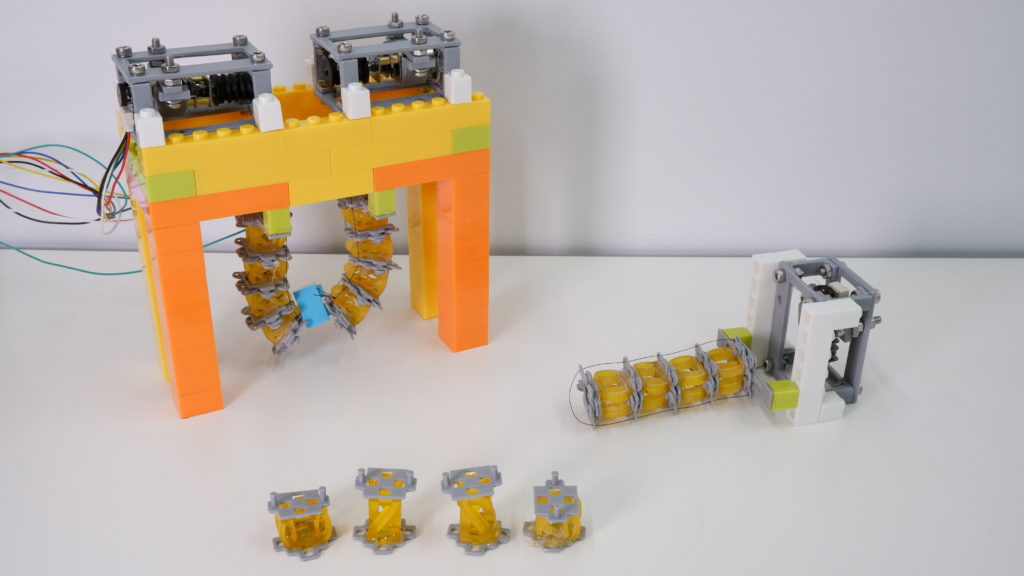
本研究は,おもちゃのブロックのように曲げ,ひねり,圧縮などの複数の変形を起こしやすいモジュールを複数組み合せ,それらを腱駆動してユーザーが複雑な変形を自由に作り出せるようにシステムを設計しました.本研究は,大橋直和くんが主体的に取り組んでいます.
本研究は下記学会で発表しました:
第26回 情報処理学会シンポジウム INTERACTION 2022 インタラクティブ発表 2 [2022-02-28 14:50],
タイトル:「再構成可能な腱駆動モジュラーソフトロボット(2D-04)」
著者:大橋 直和,岩本 憲泰,梅舘 拓也(信州大)
インタラクティブ発表賞を受賞!