
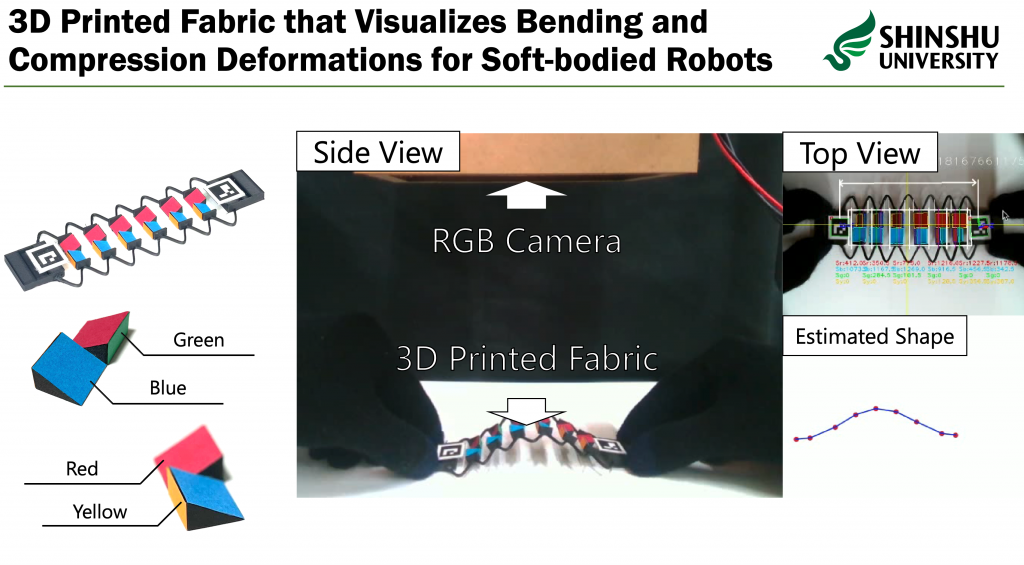
本研究は,布,生物,ソフトロボットなどの柔軟な曲面の形状と変形を測定するための多色傾き検知マーカとその測定法を提案したものです.本手法では,多色傾きマーカ(左の写真)を柔軟曲面に多数貼り付け,それを単眼カメラで撮影(中央の写真)するだけで,柔軟曲面の形状推定(右の写真)が可能です.多色傾きマーカは,3Dプリントされた立体構造にに複数の色を塗ったもので,カメラのイメージセンサに映る色面積の比率で,そのマーカの傾きを検知します.これらマーカ画像から得られる情報を,画像処理ライブラリOpenCVと提案アルゴリズムを用いることでつなぎ合わせ,曲げ変形と圧縮・伸展変形を同時に計測することが出来るようにシステムを設計しました.実際世界の多色マーカを用いた実験により,本手法にてマルチモーダルな変形分布が非常に容易に計測できることを実証しました.提案手法を用いれば,柔らかな体を持つ生き物やロボット,布などの柔軟物の複雑で豊富なマルチモーダルな変形を計測することが可能です.今後の展望として,本手法によって得られる変形情報を用いて,軟体ロボットのフィードバック制御を設計することを計画しています.
成果発表
本研究は,花岡航平くんを中心に行ったものです.本研究は,下記の学会で発表しました:
Measuring Motion of Deformed Surfaces for Soft-bodied Robots/Animals with Multi-colored Markers, K. Hanaoka, M. Shimizu, T. Umedachi, 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft2022), April 2022.
米国電気学会(IEEE)が開催するソフトロボットの国際学会RoboSoft2022(The 5th IEEE International Conference on Soft Robotics)にて,当研究室を修了した花岡くんが英語で発表を行いました.本動画はその研究の英語発表を再現したものです:
Development of 3D Printed Structure That Visualizes Bending and Compression Deformations for Soft-Bodied Robots, K. Hanaoka, M. Shimizu, T. Umedachi, Wed9Pos.6, 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), April 14, 2021 (pdf).
米国電気学会(IEEE)が開催するソフトロボットの国際学会RoboSoft2021(The fourth IEEE International Conference on Soft Robotics)にて,当研究室M2の花岡くんが英語で発表を行いました.本動画はその研究の英語発表を再現したものです:
A longer version of the presentation entitled, Development of 3D Printed Structure That Visualizes Bending and Compression Deformations for Soft-Bodied Robots, by K. Hanaoka.